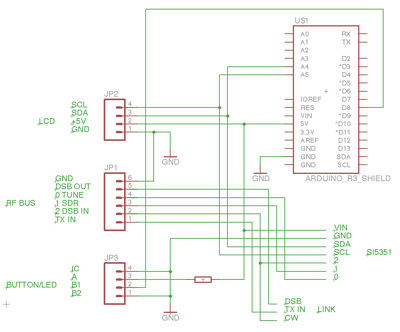
Physical connections
The setup described here is for an iMac, which has audio output (LS) and a built-in microphone, but no audio line-in. So an A-to-D/D-to-A convertor is used to provide wideband input/output audio channels. I use the Berlingher FCA202, which interfaces the iMac by Firewire (Apple persistently keeps messing around with their I/O protocols, so a couple of convertors are needed to convert the iMac's Thunderbolt to Firewire 800, then Firewire 800 to 400... £40-50!!!). The FCA202 has line-in which is the receive audio from the SDR and line-out which is the transmit audio to the SDR.
[If you lash out and buy a new MacBook it has only one I/O connector. The best solution here is to use an external A/D D/A convertor, e.g. the StarTech (look on Amazon), and connect with a USB-C to USB converter]
The computer microphone and LS are used for TX & RX listening.
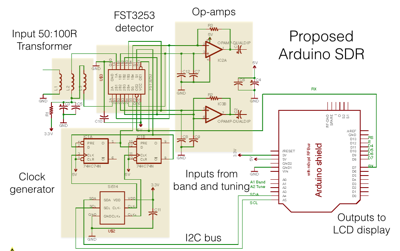
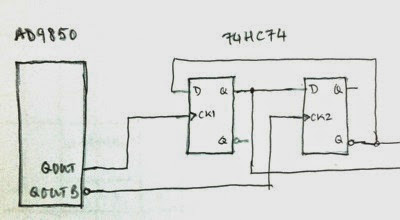
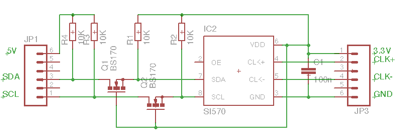
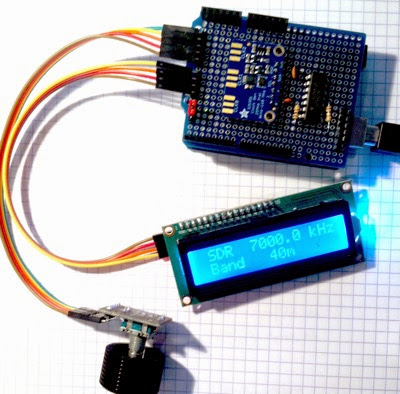
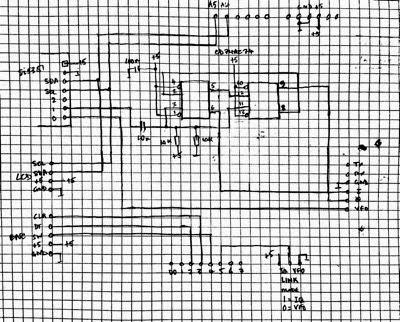
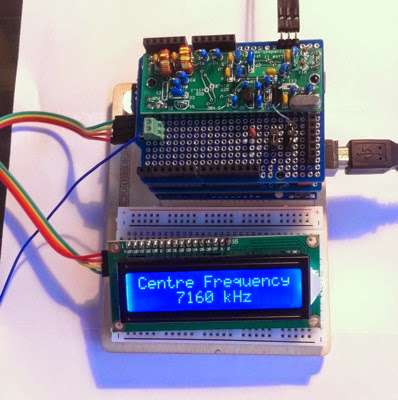
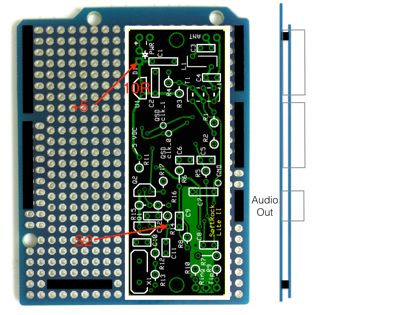
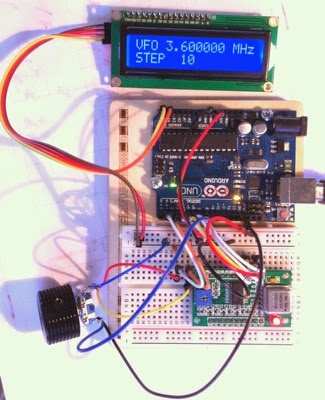
I have tested the setup, so far, only with a simple SDR receiver board, the Softrock Lite. I modified this as described in a earlier posting to use a VFO built round an Arduino and DDS board. But the original with fixed XTAL control works just as well.
Audio MIDI Setup
The first thing to do is to set up the iMac audio channels using the utility Audio MIDI Setup. This is used to create an "Aggregate" device and connect the FCA202, Built-in Microphone and Built-in Output. To do this click on the '+' button lower left and select Aggregate device. Name this something like "SDR"
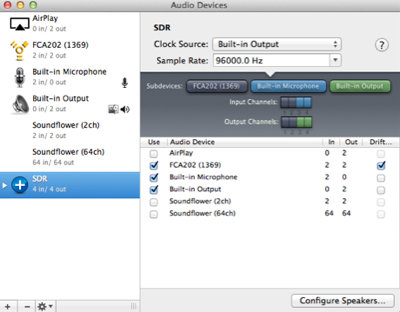
Make sure all the audio channels are set to 96kHz bandwidth, which will give the SDR about +/-48kHz tuning range.
DSP Radio setup
I am using the version 1.3.9 of DSP Radio as I have found bugs in the later version which I have yet to overcome. Launch the program and hit CTRL-A which will list the audio devices found on your iMac.
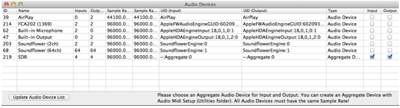
You can see here the Aggregate device you created in Audio MIDI Setup. Chose this for both Input and Output.
Next hit CTRL-C to create the RX & TX configurations. This means choosing the input/output channels for each, and setting the gain for the RX channel. The audio channels are, unfortunately not numbered the same as the numbers in Audio MIDI setup, so follow those shown here.
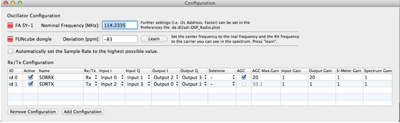
You can switch the AGC function on and off by clicking in the box, you can also set the input or output gain, the S-Meter gain and the gain applied to the spectrum display.
Using the DSP Radio
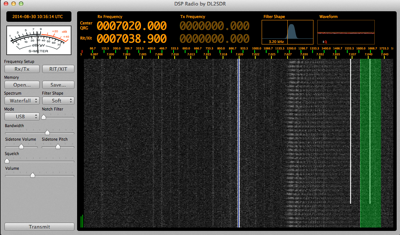
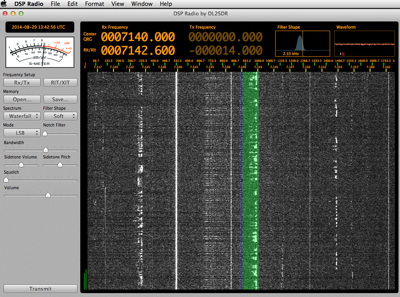
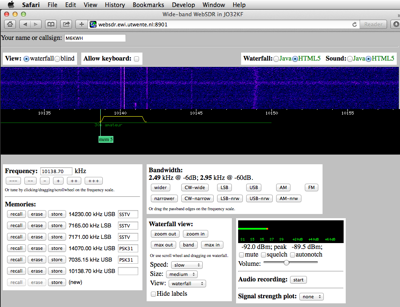
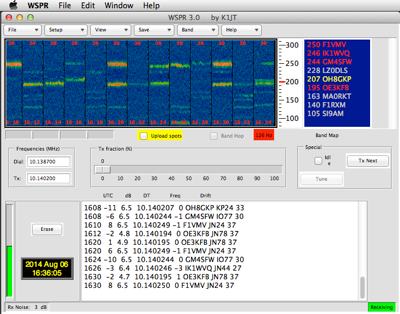
DSP Radio looks like this
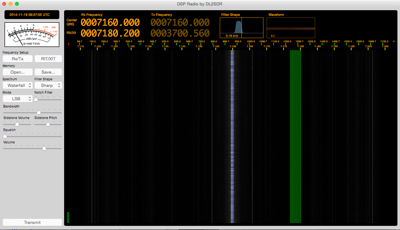
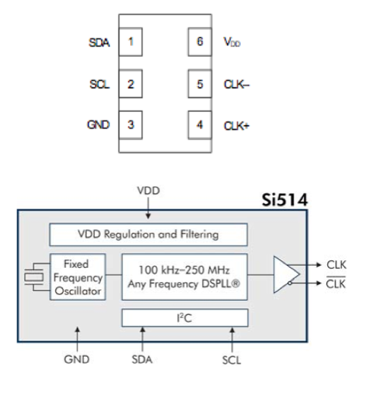
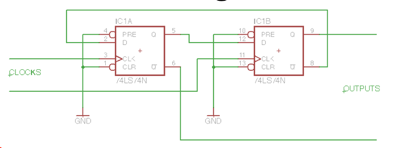
On reception the spectrum displays, and you can listen to, stations about +/- 45-48kHz from the centre frequency of the oscillator on your SDR radio. Set the centre frequency by scrubbing up/down on RX Frequency/Centre QRG or double click and enter the value in kHz. SDR radios that work receiving commands from the computer over a USB connection, like the Softrock Ensemble, will tune themselves to the frequency entered. If you do not have USB control (as in the Softrock Lite RX which I am using) then you must set the Centre Frequency to the local oscillator frequency on the receiver (remember that the receiver operates at a frequency of the XTAL divided by four as it has a /4 Johnson counter to generate the internal quadrature signals for the detector).
Select the mode, for example LSB, you should now see received signals and moving the green band across the display with the mouse will allow you to listen to the stations. The filter bandwidth can be chosen by sliding the Bandwidth slider.
If you have a transmit also SDR then you must set the RIT/XIT frequency to be the same as the indicate RX frequency, do this by clicking on the button RIT/XIT and enter the receive frequency, then click on RIT/XIT again. This will set the TX frequency to the same value as the RX frequency.
Transmit
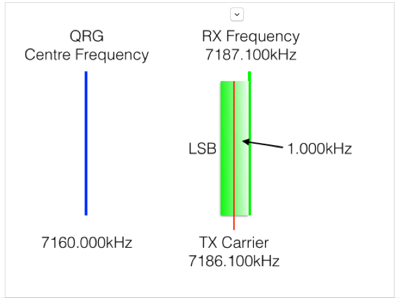
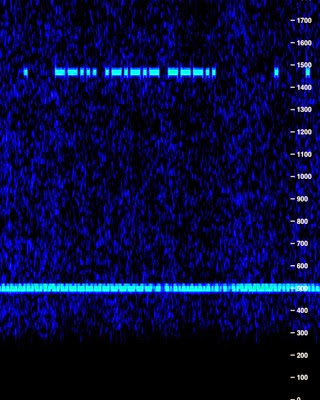
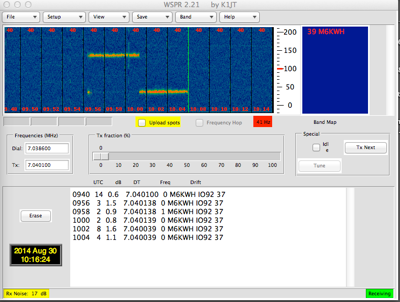
To transmit you hit the SPACE bar or the button at the bottom on the display. The DSP Radio will generate an output audio frequency the same as the receive frequency, with sideband modulation set by the mode. For example, with a Centre Frequency QRG of 7160kHz, and LSB selected, tuning to an RX frequency of 7187.100kHz and sending a 1000Hz tome will generate a TX audio output via the D-to-A convertor of 16.1kHz, thus generating a carrier output of 7186.100kHz (7160,00 + 16.1kHz.
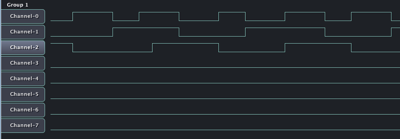
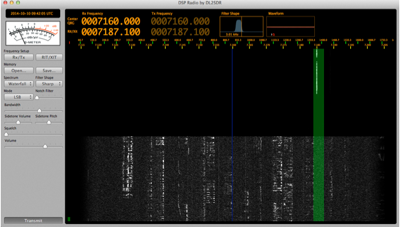
The display will show the transmitted signals, which would look like this
Comments
SDR is the future, and once you have used an SDR radio you will not want to go back. The HUGE advantage is the ability to see all the stations and relative signal strengths across a wide part of the band. When tuning to a station you can clearly see the bandwidth it is occupying and get a picture of the audio quality. It also make it easy to chose an unused channel if you wish to make a CQ call.

 Code
Code





 Here's the code:
Here's the code: