I have already described a RTTY Beacon that just sends out regular fixed text messages. Here is a modification of that code that allows users to input text messages to be sent out. The Transmit frequency still remains fixed, but that can be updated in the future.
A new Serial Terminal software is used, in place of the one built in to the Arduino IDE (I have so often opened a sketch , opened the Serial Monitor, then accidentally typed text into the sketch not the monitor window! that I decided to use a dedicated Serial Terminal program, its called iSerialTerm (Mac only)).
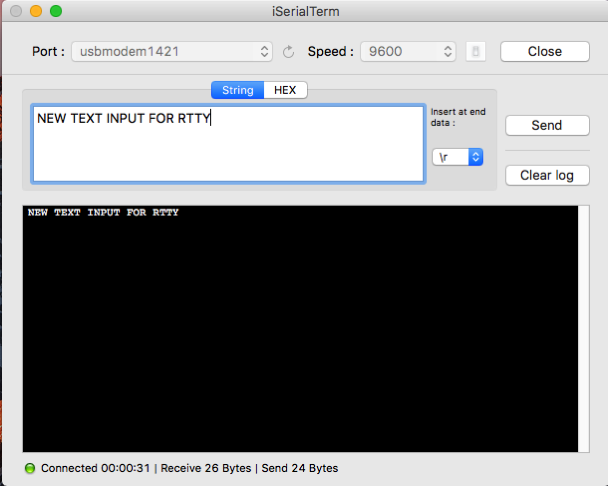 Input text on iSerialTerm, on iMac, connected by USB to Arduino UNO/AD9850
Input text on iSerialTerm, on iMac, connected by USB to Arduino UNO/AD9850
 Received text on SDR Concept radio and using HDSDR and MultiMode Cocoa decoder running on my MacBook
Received text on SDR Concept radio and using HDSDR and MultiMode Cocoa decoder running on my MacBook
Code
// RTTY_TEXT
// V1.0 29-3-17
// thanks to F0GOJ for some of the code
// AD9850
// W_CLK 8
// FQ_UD 9
// DATA 10
// RESET 11
// LCD I2C bus (16x2)
// SDA = A4
// SCL = A5
// ADS9850, LCD and Rotary Encoder libraries
#include "ADS9850.h"
#include "LiquidCrystal_I2C.h"
// AD9850 pins
#define W_CLK 8
#define FQ_UD 9
#define DATA 10
#define RESET 11
// chose address of 0x27 or 0x3F for LCD
//#define LCDADDR 0x27
#define LCDADDR 0x3F
#define LCDCOLS 16
#define LCDROWS 2
// baudot varicode in b4-b0 (sent b0->b4)
char rttyVaricode[59] = {
4, 22, 17, 5, 18, 0, 11, 26, 30, 9,
0, 0, 6, 24, 7, 23, 13, 29, 25, 16,
10, 1, 21, 28, 12, 3, 14, 15, 0, 0,
0, 19, 0, 24, 19, 14, 18, 16, 22, 11,
5, 12, 26, 30, 9, 7, 6, 3, 13, 29,
10, 20, 1, 28, 15, 25, 23, 21, 17
};
#define FIGS 27
#define LTRS 31
// message to send (u.c.)
char msg[40];
// freq in Hz and cHz
double freqHz = 7080000; // frequency Hz
double freqChz = 0; // sub freuency cHz
// ads (analog-output digital synthesiser) object
ADS9850 ads;
// lcd object
LiquidCrystal_I2C lcd(LCDADDR, LCDCOLS, LCDROWS);
void setup() {
// Serial
Serial.begin(9600);
// init LCD
lcd.begin();
//init AD9850, off to start
ads.begin(W_CLK, FQ_UD, DATA, RESET); // initialise synthesiser, pins
ads.down();
dispMsg(3, 0, "RTTY TEXT");
dispFreq(3, 1, freqHz, freqChz, 0);
}
void loop() {
if (getMsg(msg) == true) {
dispMsg(3, 1, "Sending Text... "); // sending
Serial.println(msg);
// send message at frequency
sendMsg(freqHz, freqChz, msg);
dispMsg(0, 1, " "); // clear line
}
clearBuf(msg);
}
void sendMsg(double fHz, double fChz, char *m) {
bool figsLtrs; // FIGS/LTRS toggle
char c;
figsLtrs = 1; // start in letter mode
rttyTxByte(fHz, fChz, 8); // LFCR for new message
rttyTxByte(fHz, fChz, 2);
c = *m++;
while ( c != '\0') { // EOM?
c = toupper((int)c); // get char, uppercase
if (c == 10) { // Line Feed 8
rttyTxByte(fHz, fChz, 8);
}
else if (c == 13) { // Carriage Return 2
rttyTxByte(fHz, fChz, 2);
}
else if (c == 32) {
rttyTxByte(fHz, fChz, 4);
}
else if (c > ' ' && c <= 'Z' ) { // non-baudot chars sent as blanks 00000
c = c - ' '; // c index 0-58
if (c < 33) {
if (figsLtrs == 1) { // if LTRS
figsLtrs = 0; // toggle to FIGS
rttyTxByte(fHz, fChz, FIGS); // send 27
}
}
else if (figsLtrs == 0) { // if FIGS
figsLtrs = 1; // toggle to LTRS
rttyTxByte(fHz, fChz, LTRS); // send 31
}
rttyTxByte(fHz, fChz, rttyVaricode[c]); // Send the 5 bits word
}
c = *m++; // Next character in string
}
ads.down();
}
// send at fHzSymb, fChzSymb, rttyVaricode symb nnnnn
void rttyTxByte(long fHzSymb, long fChzSymb, char symb) {
int bits, val;
// build the byte to send
symb = (symb << 2) + 3; // shift two left, add B00000011, makes B0nnnnn11
for (bits = 7; bits >= 0; bits--) { // MSB first, b7 -> b0
val = bitRead(symb, bits); // Read 1 bit
ads.setFreq(fHzSymb + (170 * val), fChzSymb, 0); // Let's transmit (bit 1 is 170Hz shifted up)
delay(22); // Gives the baud rate, 22ms per bit
}
delay(110); // intersumbol pause
}
// get input msg[] U.C.
bool getMsg(char *m)
{
char ch;
int n;
n = 0;
if (Serial.available() > 0) { // if input
while (Serial.available() > 0) { // get input
ch = Serial.read(); // use upper case as input
if (ch == '\n') ch = '\0'; // end of text
m[n++] = ch;
delay(20); // let USB catch up
}
return true; // got input
}
return false; // no input
}
// clear msg and buffer
void clearBuf(char *m) {
m[0] = '\0';
while (Serial.available() > 0) Serial.read();
}
// display freq at c)ol, r)ow, f (cHz), d decimal places
void dispFreq(uint8_t c, uint8_t r, float f, float cf, uint8_t d) {
lcd.setCursor(c, r);
lcd.print((f + cf / 100.0), d);
lcd.print("Hz ");
}
// display msg *m at c)ol, r)ow
void dispMsg(uint8_t c, uint8_t r, char *m) {
lcd.setCursor(c, r);
lcd.print(m);
}
 Transmit chain
Transmit chain Receive chain
Receive chain Simple JT65 QSO Messages
Simple JT65 QSO Messages My Desk Top, SDR Concept RX, iMac running HDSDR and JT65-HF programs, AD9850 synthesiser TX
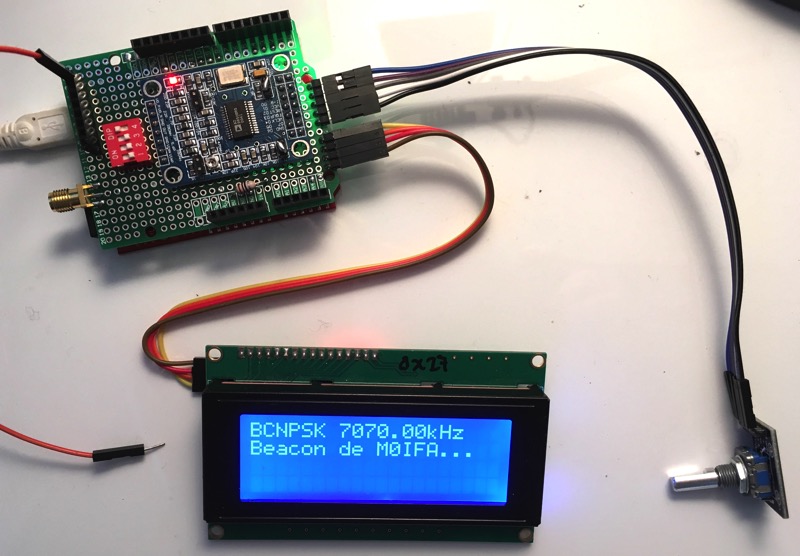
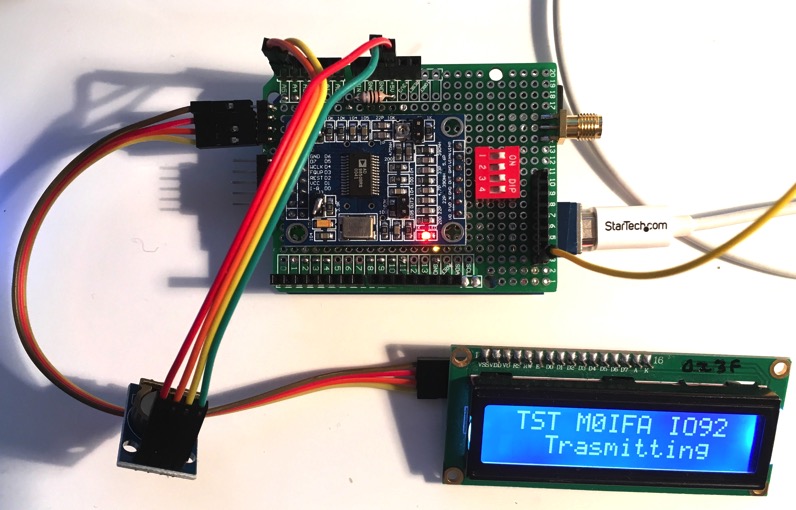
My Desk Top, SDR Concept RX, iMac running HDSDR and JT65-HF programs, AD9850 synthesiser TX Close up of the RX and TX. Note the tiny piece of yellow wire which is the TX antenna!
Close up of the RX and TX. Note the tiny piece of yellow wire which is the TX antenna! iSerialTerm app running on my MacBook to communicate via Serial with the Arduino UNO. Note 9600 baud, and line end '\n'.
iSerialTerm app running on my MacBook to communicate via Serial with the Arduino UNO. Note 9600 baud, and line end '\n'. The message entered on the MacBook, TX waiting for an on-the-minute timing to start sending
The message entered on the MacBook, TX waiting for an on-the-minute timing to start sending The TX sending the message
The TX sending the message The SDR receiver tuning, centre frequency 7050kHz
The SDR receiver tuning, centre frequency 7050kHz The HDSDR signal received
The HDSDR signal received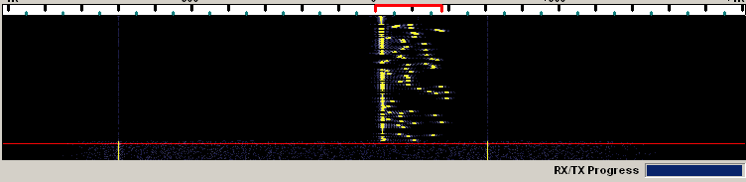 The JT65-HF signal received
The JT65-HF signal received ... and finally the text message received. Voila.
... and finally the text message received. Voila.



 Code
Code